
1. Hệ tọa độ trong không gian
Hệ trục tọa độ Đề-các vuông góc trong không gian gồm ba trục x’Ox, y’Oy, z’Oz vuông góc với nhau từng đôi một. Gọi i→; j→; k→ lần lượt là các vectơ đơn vị trên các trục x’Ox, y’Oy, z’Oz . Điểm O được gọi là gốc tọa độ. Các mặt phẳng (Oxy), (Oyz), (Oxz) được gọi là các mặt phẳng tọa độ.
Không gian gắn với hệ tọa độ Oxyz được gọi là không gian Oxyz .
2. Tọa độ của một điểm
Trong không gian Oxyz cho một điểm tùy ý M.
Khi đó tồn tại duy nhất bộ số (x; y; z) thỏa mãn:
![]()
Ta nói rằng điểm M có tọa độ là (x; y; z) và viết M = (x; y; z) hoặc M(x; y; z) .
Chú ý. Nếu điểm A thuộc trục Ox thì tọa độ của A có dạng A
Nếu điểm B thuộc trục Oy thì tọa độ của B có dạng B(0; b; 0)
Nếu điểm C thuộc trục Oz thì tọa độ của C có dạng C(0; 0; c)
3. Tọa độ của một vectơ
Trong không gian Oxyz cho vectơ a→ bất kì. Khi đó tồn tại duy nhất bộ số (x; y; z) thỏa mãn:
![]()
Ta nói rằng vectơ a→ có tọa độ là (x; y; z) và viết a→(x; y; z) = hoặc a→ (x; y; z).
Chú ý. Tọa độ của điểm M chính là tọa độ của vectơ OM→ .
Tọa độ của các vectơ đơn vị là:
![]()
Tọa độ của vectơ 0→ là (0;0;0).
4. Biểu thức tọa độ của các phép toán vectơ
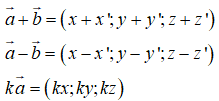
Trong không gian Oxyz , cho hai vectơ a→ = (x; y; z), b→ = (x’; y’; z’) và một số thực k. Khi đó ta có:
Chú ý.
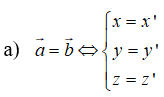
b) Cho vectơ a→ ≠ 0→ . Khi đó vectơ b→ cùng phương với vectơ a→ khi và chỉ khi tồn tại một số thực k sao cho b→ = ka→ , điều đó tương đương với

c) Nếu A(xA, yA, zA), B(xB, yB, zB) thì AB→ = (xB – xA, yB – yA, zB – zA ).
d) Ba điểm phân biệt A, B, C thẳng hàng khi và chỉ khi hai vectơ AB→, AC→ cùng phương, nghĩa là tồn tại một số thực k sao cho AB→ = kAC→ .